
Как происходит поворот колес автомобиля
Опубликовано: 11.05.2024

Поскольку орган управления — рулевое колесо — постоянно находится в руках водителя, оно на современных автомобилях выполняет также информационную функцию — по усилиям, вибрациям на рулевом колесе происходит передача водителю информации о состоянии дорожного покрытия, нагруженности контакта колес с дорогой.
Рулевое управление автомобиля должно обеспечивать ощущаемую водителем связь между углом поворота рулевого колеса и направлением движения автомобиля, обладать высокой надежностью. Усилия, необходимые для управления, не должны приводить к повышенной утомляемости водителя и в тоже время должны информировать его о состоянии контакта управляемых колес с дорогой (обеспечивать «чувство дороги»). От рулевого управления зависит минимальный радиус поворота автомобиля на ограниченных площадях. Конструкция рулевого управления не должна передавать ударные нагрузки от неровностей дороги на руки водителя.
Все перечисленные выше требования учитываются при проектировании рулевого управления.
Изменить направление движения автомобиля можно двумя различными способами: за счет поворота колес или звеньев автомобиля в горизонтальной плоскости (кинематический способ) или за счет создания на колесах правого и левого борта различных по величине или по направлению продольных сил (силовой способ) (г).
Для управления большинством современных автомобилей применяется кинематический способ, который может быть реализован путем: — поворота управляемой оси (а);
— поворота управляемых колес (б);
— поворота сочлененных звеньев (складывания рамы) (в).
Поворот управляемой оси — это наиболее старый из известных способов управления. Он применялся еще на двухосных гужевых повозках. При таком способе ось с колесами поворачивалась относительно шкворня, установленного в центре повозки. Система управления получалась очень простой, но требовала сильного сужения передней части кузова для перекатывания управляемых колес, не обеспечивала демпфирования ударов от неровностей дороги на органы управления и при предельных углах поворота оси возникала опасность бокового опрокидывания из-за уменьшения площади опоры автомобиля.
Для частичного устранения указанных недостатков пытались заменить управляемую ось одним колесом, установленным по центру автомобиля (например, автомобиль К. Бенца). В настоящее время такая схема поворота осталась на двух- и трехколесных транспортных средствах. Поворот управляемой оси сегодня применяется только на прицепах.
Принцип управления за счет поворота сочлененных звеньев применяется в случае, когда колеса транспортного средства имеют большие размеры и поворот каждого из них затруднен. Несущая система транспортного средства состоит из двух частей, к каждой из которой присоединена передняя и задняя оси. Обе части соединены друг с другом подвижно с помощью вертикального шкворня. Относительный поворот частей («складывание» рамы или иной несущей системы) происходит с помощью гидравлических цилиндров рулевого управления. К недостаткам данной схемы относится низкая точность управления при высокой скорости, трудность размещения кузовов или кабин на двух подвижных частях рамы, усложнение трансмиссии. В связи с этим данный способ рулевого управления на современных автомобилях применяется редко, основная сфера использования — тихоходные тракторы, дорожно-строительные машины, специальные вездеходы и т. п.
Наибольшее распространение в конструкции автомобиля получило рулевое управление с поворотными колесами. В этом случае каждое управляемое колесо может поворачиваться в горизонтальной плоскости относительно собственной оси поворота. Для синхронизации поворота правого и левого колеса одной оси они связаны шарнирным механизмом — рулевой трапецией.
Рулевая трапеция обеспечивает поворот правого и левого колес на разные углы, что позволяет им катиться на повороте по разным радиусам без проскальзывания.
Основные преимущества указанной схемы поворота: колеса занимают при поворотах небольшой объем внутри кузова, что позволяет удобно размещать над управляемым мостом другие агрегаты автомобиля (двигатель, трансмиссию и т. д.); для поворота колес требуются незначительные усилия, близкое расположение колеса к оси его поворота уменьшает удары, передающиеся от дороги на рулевое управление.
Двухосный автомобиль имеет, как правило, одну переднюю ось с управляемыми колесами. Иногда для улучшения маневренности такие автомобили снабжают всеми управляемыми колесами, но при этом усложняется конструкция рулевого управления и возникают проблемы с управляемостью на высокой скорости. Поэтому на автотранспортных средствах с передними и задними управляемыми колесами при движении с высокими скоростями принудительное управление задними колесами отключают, а колеса фиксируются в нейтральном положении.
Для современных скоростных легковых автомобилей конструкция подвески задних неуправляемых колес и наличие упругих резинометаллических шарниров крепления рычагов к несущей системе (эластокинематика подвески) обеспечивает при движении на повороте незначительные углы поворота колес из-за крена кузова и действия на колеса боковых сил. Это явление называется «доворотом» неуправляемых колес и при правильно спроектированной подвеске позволяет улучшить управляемость в скоростных поворотах.
Одну ось с управляемыми колесами могут иметь и трехосные автомобили, но при условии, что вторая и третья неуправляемые оси сближены. Если эти оси разнесены или автомобиль имеет более трех осей, то для предотвращения бокового проскальзывания колес применяют несколько осей с управляемыми колесами.
При этом водитель непосредственно поворачивает колеса первой оси, колеса прочих осей связаны с первой осью с помощью механических, гидравлических или электрогидравлических передач, которые управляют их поворотом. Управляемые колеса полуприцепов могут поворачиваться в зависимости от угла складывания между автомобилем-тягачом и полуприцепом или двумя частями сочлененных автобусов.
Самоустанавливающаяся ось полуприцепа
В ряде случаев для упрощения конструкции рулевого управления задние поворотные колеса многоосных автомобилей и прицепов делаются самоустанавливающимися, т. е. колеса на повороте сами поворачиваются на углы, при которых на них не воздействуют боковые силы.
Силовой способ поворота автомобиля аналогичен способу поворотов гусеничных машин. При этом способе функции рулевого управления выполняет специальная трансмиссия. При воздействии водителя наорганы управления трансмиссия подтормаживает колеса одного борта с подачей тяговых сил на колеса другого, что вызывает появление момента сил правого и левого борта, который стремится повернуть машину относительно вертикальной оси. Такая схема управления обеспечивает поворот практически на месте. Но силовой способу правления на современных автомобилях почти не применяется, что связано с низкой точностью управления на большой скоростяи, высоким износом шин, необходимостью устанавливать двигатели повышенной мощности и сложные трансмиссии.
Вместе с тем силовой способ управления поворотом все же применяется в современных автомобилях, но не в качестве основного, а как основа функционирования электронной системы стабилизации траектории ESP.
Изменение направления движения автомобиля достигается поворачиванием передних колес влево или вправо при помощи рулевого управления.
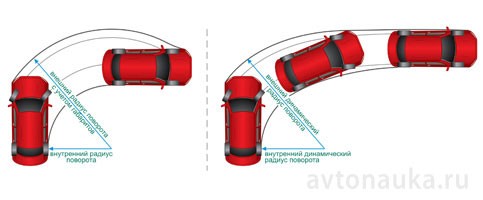
Для того чтобы при движении автомобиля на повороте колеса его имели качение без скольжения, они должны катиться по окружностям, описанным из одного центра — центра поворота, лежащего в точке О, на линии задней оси автомобиля. В результате при повороте колеса автомобиля описывают окружности разного радиуса: передние колеса, описывают окружность большего радиуса, чем задние.
Безопасность движения на закруглениях пути (поворотах) определяется следующими условиями.
Когда автомобиль движется по окружности, возникает центростремительная сила, удерживающая автомобиль на окружности, и центробежная сила, стремящаяся отбросить автомобиль от центра вращения.
Величина центробежной силы непостоянна и зависит от массы автомобиля, радиуса поворота и скорости движения.
Чем больше масса автомобиля, тем больше его инерция, а следовательно, и центростремительная сила. Это, в свою очередь, вызывает увеличение центробежной силы, которая равна и противоположна центростремительной. Таким образом, между весом автомобиля (массой) и центробежной силой существует прямая пропорциональная зависимость. Это означает, что величина центробежной силы увеличивается во столько же раз, во сколько раз увеличивается масса. Если вес автомобиля возрастет в два раза, то и центробежная сила увеличится в два раза, и т. д.
Между центробежной силой и радиусом поворота зависимость обратно пропорциональная: при увеличении радиуса поворота величина центробежной силы уменьшается. И, наоборот, во сколько раз меньше угол поворота, во столько раз больше центробежная сила.
При увеличении скорости движения центробежная сила возрастает, но не в простой зависимости, а в квадратной, т. е. так же, как в зависимости от скорости движения возрастает тормозной путь автомобиля. Если скорость движения автомобиля возрастет в два раза, величина центробежной силы возрастет в четыре раза, при возрастании скорости в три раза центробежная сила увеличится в девять раз и т. д.
Опасность увеличения центробежной силы состоит в том, что, стремясь отбросить автомобиль с окружности, она может вызвать боковой занос на повороте. При всех возможных случаях бокового скольжения занос автомобиля на повороте является наиболее опасным по следующим причинам: занос на повороте, как правило, вызывает скольжение задней оси, что опаснее заноса передней оси; вывести автомобиль из заноса на повороте труднее из-за ограниченного пространства.

Рис. Схема поворота автомобиля передним ходом
Занос на повороте опасен еще и тем, что чаще всего вызывает опрокидывание автомобиля, особенно при высокорасположенном центре тяжести, например при высокой укладке груза. Достаточно колесу при боковом скольжении встретить препятствие — камень, колею, канаву, как центробежная сила, приложенная к центру тяжести автомобиля, опрокинет автомобиль через это колесо.
Из сказанного должно быть понятно, что вероятность бокового заноса на повороте тем больше, чем выше скорость движения, больше вес автомобиля, меньше (круче) угол поворота, хуже сцепление колес с дорогой (когда центробежная сила может превысить центростремительную силу — силу трения).
Наиболее верным средством предупреждения опасности бокового заноса при повороте является снижение скорости движения. Прибегать к торможению на повороте ии в коем случае нельзя, так как вследствие реакции торможения уменьшается сцепление колес с поверхностью дороги, что облегчает возникновение заноса (торможение на повороте ухудшает устойчивость автомобиля).
При возникновении бокового заноса на повороте надо иметь в виду следующее: если при боковом скольжении задней оси автомобиля на прямой дороге водитель прекращает занос поворотом руля в сторону заноса, то на повороте этим способом автомобиль может попасть в придорожную канаву. Поэтому, не теряя присугствия духа, надо попытаться вывести автомобиль из бокового заноса на повороте сильной подачей горючей смеси, направляя колеса по оси движения, т. е. в нужном направлении. Можно сказать с уверенностью, что, если это произойдет во второй половине поворота, когда колеса начинают поворачиваться на прямую дорогу, своевременная подача горючей смеси даст возможность вывести автомобиль из заноса.
Приближаясь к повороту, водитель должен рассчитать, с какой скоростью можно пройти поворот. Чем круче поворот, хуже сцепление колес с дорогой (мокрая, скользкая дорога), больше вес автомобиля, выше расположен центр тяжести машины, тем меньше должна быть скорость автомобиля.
Правила безопасности движения обязывают водителя при приближении к закруглениям дороги заблаговременно снижать скорость и на поворотах двигаться на пониженной скорости.
Приведенные положения водитель должен хорошо знать и твердо запомнить, чтобы, двигаясь на поворотах, не создавать опасности несчастного случая, аварии, поломки автомобиля.
При поворотах на большой угол надо помнить, что автомобиль при повороте занимает больше места, чем при движении в прямом направлении. Поэтому, особенно при поворотах в левую сторону, надо не затягивать поворот и не мешать проезду другого транспорта. Радиус поворота передних колес должен быть настолько большим, чтобы задние колеса, поворачивающиеся по дуге меньшего радиуса, не наехали на препятствие.
Поворот будет совершен технически правильно, если задние колеса при повороте в правую сторону пройдут на одинаковом расстоянии от закругления дороги, а при повороте в левую сторону — от центра поворота.
В целях безопасности движения нужно заблаговременно (за 100—120 м) предупреждать о повороте включением указателей поворота, а при отсутствии указателей — рукой или открыванием дверцы кабины.

Рис. Схема движения колес автомобиля при объезде препятствия передним ходом: А — правильно; Б — неправильно
Изучая технику изменения направления движения автомобиля, следует отличать повороты односторонние от поворотов двойных.
Односторонние повороты применяются во всех случаях, когда требуется изменить направление движения автомобиля. Двойной поворот служит лишь для объезда препятствия или движения между препятствиями, для объезда пешехода, идущего по дороге, и с изменением основного направления движения не связан.
Поворачивание рулевого колеса производится следующим образом.

Рис. Схема двойного поворота рулевого колеса (влево-вправо): А — начало поворота; Б — окончание поворота
При поворотах на небольшой угол, а также при двойных поворотах водитель перемещает руки вместе с рулевым колесом, но при этом он должен избегать перекрещивания рук, что может затруднить управление и привести к аварии.

Рис. Перекрещивание рук на рулевом колесе при двойном повороте (неправильный прием)
Очень важно выработать привычку перед самым поворотом быстро осматриваться назад и в сторону поворота, а перед поворотом в левую сторону, пользуясь зеркалом заднего вида, просматривать дорогу позади автомобиля.
Ни в коем случае нельзя поворачивать передние колеса рулевым колесом при неподвижном автомобиле, так как это приводит к чрезмерным, вредным напряжениям в механизме рулевого управления.
В этой статье речь пойдет не о том, как устроено рулевое управление автомобиля, а о том, как автомобиль ведет себя на дороге во время поворота. О том, как в этот момент распределяются силы по колесам, и как весь этот процесс движения автомобиля на повороте, когда автомобиль поворачивает, влияет на безопасность его движения на дуге поворота.
Это необходимо знать в первую очередь для того, чтобы понять по каким причинам автомобиль может произвольно «уйти» с заданной траектории движения. Произвольно – это когда водитель этого не хотел, но так получилось, вопреки всем стараниям удержать автомобиль на дороге.
Что такое поворот автомобиля
Что такое поворот автомобиля (из области физических понятий). Поворот автомобиля – это изменение направления его движения отличного от прямолинейного. Что это означает?
Когда передние колеса находятся в положении «прямо», то автомобиль движется прямолинейно, т.е. по прямой. Если передние колеса повернуть на любой, самый незначительный угол, то автомобиль начнет поворачивать. Радиус поворота автомобиля зависит от величины угла поворота передних колес. Чем больше повернуты колеса, тем меньше радиус поворота.
Поскольку поворот колес осуществляется механизмом рулевого управления, то рассуждая о движении автомобиля в повороте, принято говорить не об углах поворота передних колес, а повороте рулевого колеса. Даже незначительный поворот руля «уведет» автомобиль с прямолинейной траектории.
Если повернуть руль, зафиксировать его в одном положении и приступить к движению, то автомобиль опишет окружность. Центр окружности, вдоль которой поворачивает автомобиль, всегда лежит на «продолжении» задней оси автомобиля, а радиус поворота автомобиля изменяется вращением рулевого колеса (углом поворота передних колес).
Итак, ответ на вопрос, что такое поворот автомобиля – это изменение направления его движения, осуществляемое путем вращения рулевого колеса на некоторый угол в определенную сторону (влево или вправо) в процессе движения. Это не официальное определение, но оно вполне понятно для осмысления процесса движения автомобиля на повороте.
Силы, действующие на автомобиль в повороте
Машина остается управляемой, когда колеса имеют контакт с дорогой достаточный для того, чтобы колеса, цепляясь за дорогу, катились, а не скользили. С увеличением скорости этот контакт несколько ослабевает, и в зависимости от качества (состояния) дорожного покрытия может исчезнуть совсем. Это свойство заметно проявляется на скользкой поверхности дороги (песок, мокрая глина, дождь, слякоть, снег, гололед).
Автомобиль опирается на дорогу четырьмя колесами (для упрощения понимания действия сил рассмотрим легковой автомобиль). Сложная система подвески помогает преодолевать неровности дороги и обеспечивает водителю и пассажирам определенный комфорт, но важно понять, что сцепление с дорожным покрытием автомобилю обеспечивают только четыре пятна контакта его колес.
В состоянии покоя, когда автомобиль стоит на месте, вес автомобиля равномерно распределен по всем его колесам. Можно сказать, что вес равномерно «давит» на все четыре колеса автомобиля.
В момент начала движения (старта) и набора скорости (разгона) вес автомобиля перемещается назад. В момент замедления автомобиля (торможения, в т.ч. используя двигатель, или сброс газа) и его остановки, вес перемещается вперед. Этот механизм загрузки-разгрузки по осям описан в статье Осторожно скользкая дорога.
Когда автомобиль наберет скорость и движется прямолинейно на постоянной тяге (число оборотов двигателя остается неизменным), вес автомобиля почти равномерно распределяется по всем колесам. И если полотно дороги более-менее ровное и сцепление колес с дорожным полотном хорошее, тогда автомобиль на дороге устойчив и управляем – он легко слушается руля.
Но реальность такова, что дорога не всегда прямолинейна и не без изъянов. Приходится все время корректировать линию движение поворотом руля, как на прямой дороге, так и на ее изгибах.
Поворачивать приходится и на перекрестках, и на дорожных развязках, которые могут оказаться достаточно крутыми, и на естественных изгибах дороги. Вращение руля приходится использовать везде и в разных условиях: хотя бы для того чтобы выехать из двора (прилегающей территории), повернуть на дорогу, объехать яму и пр.

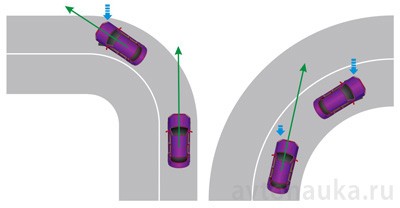
Что происходит с автомобилем, когда он поворачивает? Поскольку любой автомобиль имеет вес и обладает инерцией, то когда автомобиль приступает к повороту, его вес как бы продолжает двигаться по прямой, т.е. центр массы автомобиля стремится за пределы окружности поворота с силой, которую дает ему ускорение (чтоб было понятнее — скорость). Вектор силы направлен перпендикулярно радиусу поворота.
Это стремление «вырваться» за пределы дуги поворота тем сильнее, чем меньше радиус поворота (чем больше выкручен руль) и чем выше скорость автомобиля в повороте. Именно по этой причине скорость необходимо снизить еще до входа в поворот, а непосредственно дугу поворота необходимо пройти на постоянной (неизменной) скорости (на ровной «тяге»).
Последствия перемещения веса в процессе поворота автомобиля неминуемо сказываются на качестве сцепления колес с дорожным покрытием. Во время движения автомобиля в повороте происходит перераспределение его веса на каждом! из его четырех колес. Что это значит?
Это значит, что при повороте автомобиля сцепление с дорогой у всех колес неравномерное. Самым нагруженным колесом становится «внешнее» переднее колесо относительно дуги поворота. На правом повороте этим колесом становится переднее левое, а на левом повороте – переднее правое.
Соответственно, у этих колес на повороте будет самое сильное сцепление с дорожным полотном. У остальных колес сцепление с дорогой на поворотах в разной степени ослабевает. Этот процесс изменения качества сцепления происходит непрерывно с каждым поворотом рулевого колеса!
Автомобиль остается управляемым и слушается поворота руля только благодаря хорошему сцеплению колес с дорожным покрытием. Хорошее сцепление – это когда колеса автомобиля катятся и цепляются за дорогу, а не скользят. Причем, не важно, автомобиль движется в повороте или он едет по прямой дороге, и неважно, действие происходит летом на сухой дороге или зимой, во время гололеда.
Решающий фактор – скорость. Если автомобиль начинает терять сцепление с дорогой, значит его скорость в данных дорожных условиях высокая. Следовательно, нужно снизить скорость и не доводить ситуацию до критических обстоятельств.
Разница между особенностями движения на летней и зимней дороге состоит лишь в том, что на зимней скользкой дороге автомобиль потеряет сцепление с дорогой (заскользит) на значительно меньшей скорости, чем на летней сухой дороге при прочих равных условиях движения!
На одном и том же полотне дороги во время движения автомобиля на повороте его колеса заскользят быстрее, чем на прямолинейном движении. Чем выше скорость на дуге поворота, тем выше вероятность срыва колес в скольжение (и как следствие, это снос или занос). Это правило необходимо учитывать во время движения на скользкой дороге.
Перераспределение веса по колесам автомобиля происходит при каждом повороте руля, в том числе и при корректировке движения на прямой дороге. Поэтому руль всегда необходимо поворачивать плавно. Быстро, но плавно, не делая резких движений.
В таких ситуациях хорошую помощь оказывают электронные системы стабилизации, но не стоит полностью полагаться только на автомобильную электронику.
Главный за рулем – это водитель, а электронный помощник – это всего лишь умный помощник в умелых руках.
В дополнение изложенному материалу предлагаю ознакомиться с содержанием следующих статей:
Автор: Сергей Довженко
Последняя редакция: 31.05.2020
Если есть желание поделиться прочитанным, ниже кнопки на выбор. Жмем, не стесняемся.
На автомобилях используется кинематический способ смены направления движения, подразумевающий, что осуществление поворота происходит за счет смены положения управляемых колес. Обычно управляемой является передняя ось, хотя существуют и авто с так называемой системой подруливания. Особенность работы в таких авто заключается в том, что колеса задней оси тоже поворачиваются при изменении направления, хоть и на меньший угол. Но пока эта система широкого распространения не получила.
Помимо кинематического способа на технике используется еще и силовой. Особенность его заключается в том, что для совершения поворота колеса одной стороны притормаживаются, в то время, как с другой стороны они продолжают двигаться с прежней скоростью. И хоть этот способ изменения направления на легковых авто распространения не получил, на них он все же используется, но в несколько ином качестве – как система курсовой устойчивости.
Этот узел автомобиля состоит из трех основных элементов:
- рулевая колонка;
- рулевой механизм;
- привод (система тяг и рычагов);

Рулевой узел
У каждой составляющей – своя задача.
Рулевая колонка
Выполняет передачу вращательного усилия, которое создает водитель для изменения направления. Состоит она из рулевого колеса, располагаемого в салоне (на него и воздействует водитель, вращая его). Оно жестко посажено на вал колонки. В устройстве этой части рулевого управления очень часто используется вал, разделенный на несколько частей, соединенных между собой карданными шарнирами.
Такая конструкция сделана не просто так. Во-первых, это позволяет менять угол положения рулевого колеса относительно механизма, смещать его в определенную сторону, что нередко необходимо при компоновке составных частей авто. В дополнение такая конструкция позволяет повысить комфортабельность салона – водитель может менять положение рулевого колеса по вылету и наклону, обеспечивая максимально удобное его положение.
Во-вторых, составная рулевая колонка имеет свойство «ломаться» в случае ДТП, снижая вероятность травмирования водителя. Суть такова – при фронтальном ударе двигатель может сместиться назад и толкнуть рулевой механизм. Если бы вал колонки был цельным, изменение положения механизма привело бы к выходу вала с рулевым колесом в салон. В случае же со составной колонкой, перемещение механизма будет сопровождаться всего лишь изменением угла одной составляющей вала относительно второй, а сама колонка остается неподвижной.










Принцип работы электроусилителя руля
Принцип работы электроусилителя руля следующий: при повороте водителем рулевого колеса происходит скручивание торсионного вала. Эту информацию блоку управления передает датчик крутящего момента. ЭБУ обрабатывает данные, соотносит их с показаниями других датчиков и вычисляет усилие, которое необходимо приложить, чтобы помочь водителю повернуть колеса. Электрический двигатель получает команду и воздействует на вал рулевой колонки либо на рулевую рейку.
Различают следующие режимы работы электроусилителя:
- поворот автомобиля в обычном режиме;
- поворот машины на большой скорости;
- поворот машины на малой скорости;
- возврат колес в среднее положение;
- поддержание колес в среднем положении.
Рулевой механизм
Предназначен для преобразования вращения вала рулевой колонки в поступательные движения элементов привода.
Наибольшее распространение на легковых автомобилях получили механизмы типа «шестерня-зубчатая рейка». Ранее же использовался еще один вид – «червяк-ролик», который сейчас в основном используется на грузовых авто. Еще один вариант для грузовиков – «винтовой».
«шестерня-рейка»
Распространение тип «шестерня-рейка» получил благодаря сравнительно простому устройству рулевого механизма. Состоит этот конструктивный узел из трех основных элементов – корпус, в котором размещается шестерня и перпендикулярно ей – рейка. Между двумя последними элементами имеется постоянное зубчатое зацепление.

Работает этот вид механизма так: шестерня жестко связана с рулевой колонкой, поэтому она вращается вместе с валом. Из-за зубчатого соединения вращение передается на рейку, которая при таком воздействии смещается внутри корпуса в ту или иную сторону. Если водитель вращает рулевое колесо влево, взаимодействие шестерни с рейкой приводит к тому, что последняя перемещается вправо.
Зачастую на авто применяются механизмы «шестерня-рейка» с фиксированным передаточным числом, то есть диапазон поворота рулевого колеса для изменения угла колес одинаков при всех их положениях. Для примера, предположим, что для поворота колес на угол 15° необходимо сделать 1 полный оборот руля. Так вот, неважно, в каком положении находятся управляемые колеса (крайнее, прямолинейное), для поворота на указанный угол придется сделать 1 оборот.
Но некоторые автопроизводители устанавливают на свои авто механизмы с меняющимся передаточным числом. Причем достигается это достаточно просто – изменением угла положения зубьев на рейке в определенных зонах. Эффект от этой доработки механизма такой: если колеса стоят прямо, то для изменения их положения на те же 15° (пример) требуется 1 оборот. Но если они находятся в крайнем положении, то из-за измененного передаточного числа, колеса повернуться на указанный угол уже через пол-оборота. В результате диапазон поворота руля «от края до края» значительно меньше, чем в механизме с фиксированным передаточным числом.

Рейка с переменным передаточным числом
Помимо простоты устройства тип «шестерня-рейка» используется еще потому, что в такой конструкции возможна реализация исполнительных механизмов гидроусилителя (ГУР) и электроусилителя (ЭУР), а также электрогидравлического (ЭГУР).
«червяк-ролик»
Следующий тип – «червяк-ролик», менее распространен и на легковых авто сейчас практически не используется, хотя его можно встретить на автомобилях ВАЗ классического семейства.
В основе этого механизма положена червячная передача. Представляет червяк собой винт с резьбой особого профиля. Этот винт располагается на валу, соединенном с рулевой колонкой.
С резьбой этого червяка контактирует ролик, соединенный с валом, на который посажена сошка – рычаг, взаимодействующий с элементами привода.

Червячный рулевой механизм
Суть работы механизма такова: при вращении вала, винт вращается, что приводит к продольному перемещению ролика по его резьбе. А поскольку ролик установлен на валу, то это смещение сопровождается поворотом последнего вокруг своей оси. Это в свою очередь приводит к полукруговому движению сошки, которая и воздействует на привод.
От механизма типа «червяк-ролик» на легковых авто отказались в пользу «шестерни-рейки» из-за невозможности интегрировать в него гидроусилитель (на грузовых авто он все же имелся, но исполнительный механизм был вынесенным), а также достаточно сложной конструкции привода.
Винтовой тип
Конструкция винтового механизма – еще сложнее. В ней также имеется винт с резьбой, но контактирует он не с роликом, а со специальной гайкой, на внешней стороне которой нанесен зубчатый сектор, взаимодействующий с таким же, но сделанным на валу сошки. Также существуют механизмы с промежуточными роликами между гайкой и зубчатым сектором. Принцип же действия такого механизма практически идентичен червячному – в результате взаимодействия вал проворачивается и тянет сошку, а та в свою очередь – привод.

Винтовой рулевой механизм
На винтовой механизм можно установить гидроусилитель (гайка выполняет роль поршня), но на легковых авто он не применяется из-за массивности конструкции, поэтому и используется он только на грузовиках.











Привод
Привод в конструкции рулевого управления используется для передачи перемещения рейки или сошки на управляемые колеса. Причем в задачу этой составляющей входит изменение положения колес на разные углы. Обусловлено это тем, что колеса при повороте движутся по разным радиусам. Поэтому колесо с внутренней стороны при изменении траектории движения должно поворачиваться на больший угол, чем внешнее.
Конструкция привода зависит от используемого механизма. Так, если на авто используется «шестерня-рейка», то привод состоит всего лишь из двух тяг, соединенных с поворотным кулаком (роль которого выполняет амортизационная стойка) посредством шарового наконечника.
К рейке эти тяги могут крепиться двумя способами. Менее распространенным является жесткая фиксация их болтовым соединением (в некоторых случаях соединение осуществляется через сайлент-блок). Для такого соединения в корпусе механизма проделано продольное окно.
Более распространенный метод соединения тяг – жесткое, но подвижное соединение с концами рейки. Для обеспечения такого соединения на конце обеих тяг сделан шариковый наконечник. Посредством гайки этот шар прижимается к рейке. При передвижении последней тяга меняет свое положение, что и обеспечивает имеющееся соединение.

В приводах, где используется механизм «червяк-ролик», конструкция значительно сложнее и представляет собой целую систему рычагов и тяг, получивших называние рулевой трапеции. Так, к примеру, на ВАЗ-2101 привод состоит из двух боковых тяг, одной средней, маятникового рычага и поворотных кулаков с рычагами. При этом для обеспечения возможности изменения угла положения колеса поворотный кулак крепиться к рычагам подвески при помощи двух шаровых опор (верхней и нижней).
Большое количество составных элементов, а также соединений между ними делает такой тип привода более подверженным износу и возникновению люфтов. Этот факт — еще одна причина отказа от червячного механизма в пользу реечного.
Правильная диагностика — это важно
Качество ремонта рулевого управления очень сильно зависит от проведенной правильно диагностике, в ходе которой окончательно выясняется какая деталь в действительности вышла из строя. Это как лечение больного, главное правильно поставить диагноз.
Основными деталями, которые обычно выходят из строя в рулевом управлении это рулевые тяги, рулевые рейки, рулевые наконечники и колонки, реже гидроусилители или усилители руля с электроприводом, но обычно они просто заменяются.
К признакам выхода из строя рулевых тег можно отнести:

Постоянное виляние из стороны в сторону передних колес автомобиля во время движения (признак износа шарниров в рулевой тяге).
Быстрый, буквально на глазах, износ протектора шин передних колес (признак повреждения рулевых тяг).
Слышен стук во время движения автомобиля. Данный стук говорит о том, что в соединениях рулевых тяг появились зазоры, в данной ситуации достаточно сильнее затянуть гайки. Однако может даже придется провести замену наконечника рулевой тяги вследствие его полного износа.
Но если наконечник рулевой тяги имеет сильные повреждения, то в некоторых случаях приходиться провести замену самой рулевой тяги.
В принципе ремонт рулевых тяг можно провести и самостоятельно в гаражных условиях, так как мы видим, что он предполагает замену втулок, шарниров и шкворней.
Здесь в основном присутствует механическая работа, при которой нет необходимости в большом количестве специализированного дорогостоящего оборудования, поэтому ремонт рулевого управления в данной ситуации подвластен любому опытному водителю.
«Обратная связь»
Стоит отметить, что в рулевом механизме существует еще и так называемая «обратная связь». Водитель не только воздействует на колеса, а посредством ее же получает информацию об особенностях движения колес по дороге. Проявляется это в виде вибраций, рывков, создания определенно направленных усилий на руле. Эта информация считается очень важной для правильной оценки поведения авто. Доказательством тому является тот факт, что в авто, оснащаемых ГУР и ЭУР, конструкторы сохранили «обратную связь».
Профилактика
Чтобы устройство рулевого управления автомобиля служило долго, необходимо уделять внимание его профилактике. Тщательная проверка деталей и механизмов рулевого управления сможет уберечь от поломок, требующих длительного и дорогостоящего ремонта. Помимо профилактики, большое значение имеет стиль вождения.
Предупредить возникновение неисправностей может своевременное техническое обслуживание, включающее в себя диагностику состояния рулевого механизма и других важных деталей и элементов автомобиля.
Передовые разработки
Этот узел продолжают совершенствовать, так самыми последними достижениями являются системы:
- Активного (динамического) рулевого управления. Она позволяет изменять передаточное число механизма в зависимости от скорости автомобиля. Также выполняет и дополнительную функцию – корректировка угла передних колес в поворотах и при торможении на скользкой дороге.
- Адаптивного рулевого управления (управление по проводам). Это самая новая и перспективная система. В ней отсутствует прямая связь между рулем и колесами, всё работает за счёт датчиков и исполнительных устройств (сервоприводов). Большое распространение система ещё не получила по причине психологического и экономического факторов.

Система «рули по проводам»
Новые технологии

Устройство рулевого управления автомобиля
В последнее время автопроизводители стали выпускать модели с электрическим усилителем. Такие автомобили управляются «бортовым компьютером», то есть электронной системой, работающей в автоматическом режиме. Больше всего эта система напоминает компьютерную игру, в которой специальные датчики, установленные на руле, подают на центральный компьютер сведения обо всех изменениях и изменяют положение механизмов.

Если повернуть руль до упора, выйти из машины и посмотреть на нее спереди, можно заметить, что колеса повернуты под разными углами: одно вывернуто сильнее, чем другое. Но это не неисправность, а наоборот, точный инженерный расчет, который в этом году празднует свой юбилей – ему исполняется ровно 200 лет. Почему рулевое управление так спроектировано, и почему нельзя было бы сделать иначе?
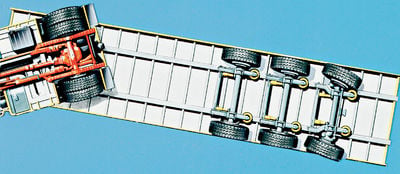
О твет на этот вопрос лежит на поверхности: представьте себе, что автомобиль движется по кругу по часовой стрелке – в этом случае окружность, по которой будет двигаться переднее правое колесо, будет меньше, чем окружность, описываемая левым. Соответственно, при постоянной скорости автомобиля колеса на одной оси будут вращаться с разной скоростью. Если бы колеса были повернуты на одинаковый угол, то внутреннее колесо, стремясь двигаться так же, как наружное, постоянно проскальзывало бы и вызывало проскальзывание наружного – при этом поведение автомобиля в повороте было бы непредсказуемым, а износ шин – катастрофическим. Наглядно это можно видеть на многоосных тележках грузовиков и прицепов: не поворачивающиеся колеса в повороте движутся с проскальзыванием, и шины изнашиваются быстро и неравномерно. Соответственно, для решения этих проблем и обеспечения правильного движения управляемых колес по их траектории они и поворачиваются на разные углы.

Сама проблема проскальзывания внутреннего колеса в повороте была актуальна задолго до массового распространения автомобилей – ведь те же проблемы были и у конных повозок. Собственно, именно на конной повозке рулевое управление, решающее эту проблему, и дебютировало: в 1817 году его изобрел Георг Ланкеншпергер, а в 1918 году запатентовал в Англии его агент Рудольф Аккерман. С тех пор принцип поворота управляющих колес на разные углы в повороте так и называется – принцип Аккермана.
Чтобы обеспечить нужные углы поворота колес, геометрия рулевой трапеции рассчитывается по единой условной схеме. В ней поперечная рулевая тяга короче управляющей оси и смещена за нее, а поворотные рулевые рычаги лежат на линии между осью поворота передних колес и центром задней оси автомобиля. Для того, чтобы проще было понять это сложное на первый взгляд объяснение, достаточно взглянуть на простую схему ниже.
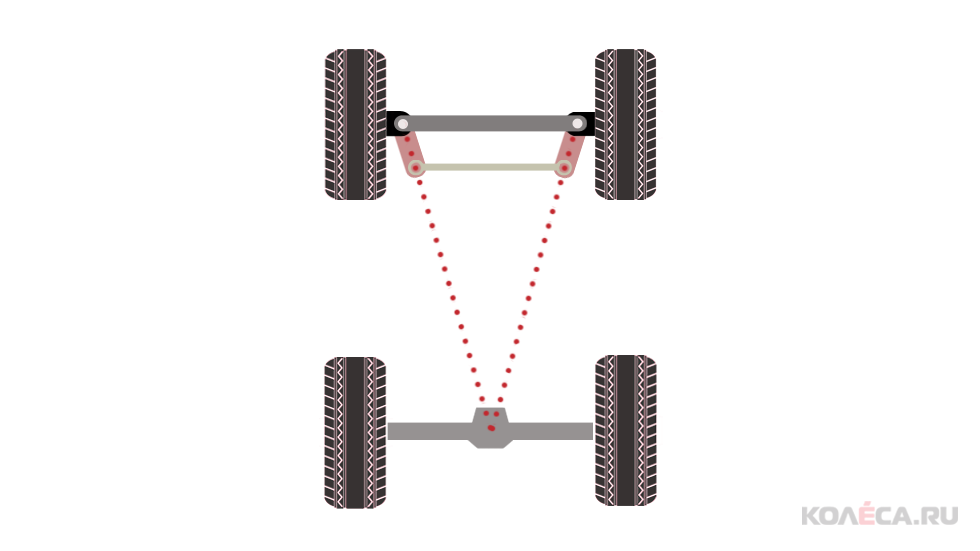
Соответственно, при повороте колес в такой схеме они оказываются повернуты на разные углы – внутреннее поворачивается больше, а наружное меньше. При этом центры окружностей, по которым движутся колеса, совпадают, а радиус окружности для наружного колеса — это фактически радиус разворота автомобиля "от бордюра до бордюра" с поправкой на ширину шины.
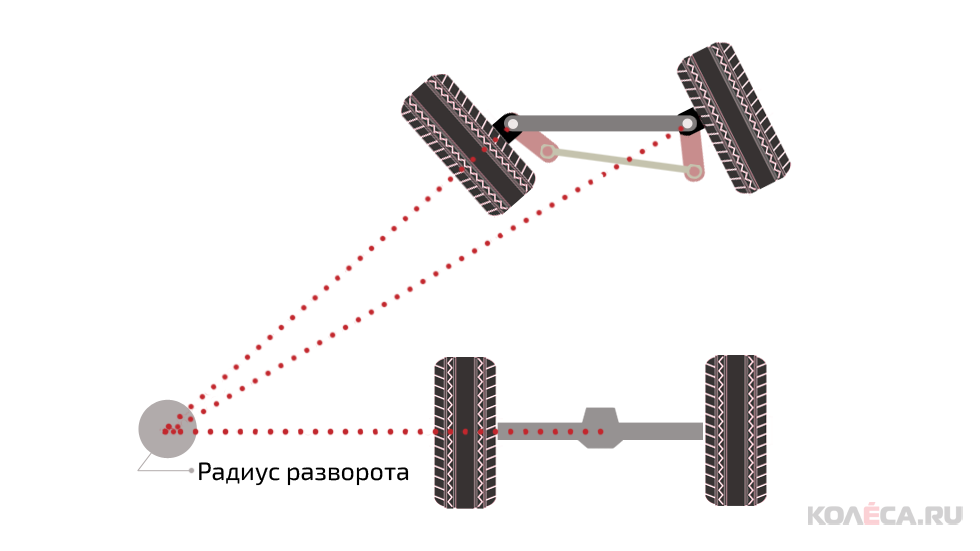
Стоит отметить, что изображение выше – схематическое, и рулевое управление автомобиля, разумеется, сложнее, чем то, что изображено на схеме. Однако общая геометрия справедлива для всех «гражданских» автомобилей.
В автоспорте подход может меняться: к примеру, на некоторых гоночных автомобилях ситуация с углами поворота колес может быть даже обратной для компенсации бокового увода колеса в скоростных поворотах, а в дрифте передние колеса стараются сделать параллельными даже в поворотах, чтобы снизить износ передних шин при постоянном движении в управляемом заносе. Но это – крайности, не актуальные для обычных серийных машин.
Кстати, в самом начале мы не зря упомянули не только разные пути, которые проходят в повороте колеса, но и разные скорости их вращения. Для того, чтобы обеспечить возможность вращения колес на одной оси с разными скоростями, как мы уже рассказывали, нужен дифференциал.
Читайте также: